Model myCobot in RoboDK
Keywords: Simulation, RoboDK, myCobot
Description
Here, I made a quick tutorial on how model an affordable cobotic arm called myCobot from Elephant Robotics in RoboDK.
Simulation allows you to plan robot motion, check reachability and foresee any collision, singularity or any other issues. Also, since cobots can be fragile and easily prone to damage compared to their industrial counterparts, it is safer to first test their motion in a simulated environment.
RoboDK is an easy to use simulator for industrial robots and offline programming. You can use it for online programming as well where you can first simulate the motions and then run it on the real robot.
There are a lot of simulation tools out there, namely Gazebo from ROS, CoppeliaSim, Drake and gaming engines like Unreal Engine and Unity which have a lot more functionalities and better visuals. But these simulators have a steep learning curve and might not be suited for everyone. I’ll soon try to add some more tutorials on how to setup your myCobot on these simulators as well, but these will be suited for intermediate robotics practioners.
RoboDK instead has a very easy to use interface and a huge library of pre-existing robots. But since it did not have the myCobot robot model yet I decided to add my own.
Firstly, you’ll need the 3D model of myCobot. As you’ll see in the tutorial, this 3D model needs to be modified to fit the RoboDK’s environment. You can find the modified 3D model at this link.
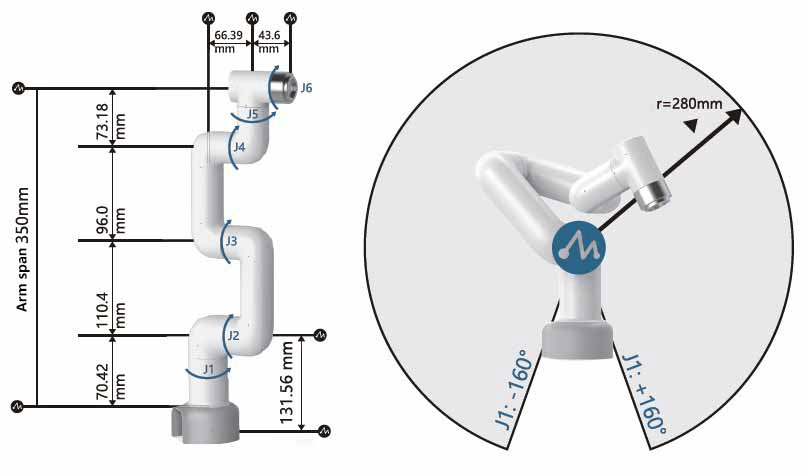
Secondly, you’ll need the robot parameters as shown in the image.
Finally, you can find the robot file of your myCobot at this link. You can import it in your RoboDK station and start playing with it.
In this video, I’ll show how to model your myCobot Pi robot in RoboDK. This will let you play with your myCobot in simulation before you run any applications on it.